



Образовательный набор для изучения технологий связи и концепции сети передачи данных между физическими объектами, IoT "Аватар"
- Артикул:HW23121202
- Цена:165 400 руб.
- Способ оплаты: Безналичный расчет
- Способ доставки: Почтой России или курьерской службой.
- Стоимость доставки: Бесплатная доставка по Н.Новгороду при заказе от 10 000 рублей. (до 10 000 руб 350 руб.)
Характеристики
- Страна производства: Россия
- Габариты, мм: 510*300*160 мм
- Количество учащихся: 2-4
- Вес, г: 2300
- Уровень образования: основное общее образование, среднее общее образование, среднее профессиональное образование, высшее образование, дополнительное образование детей и взрослых, дополнительное профессиональное образование
- Компетенции: Робототехника, Опыты и исследования, Конструирование, Программирование (языки программирования), Соревнования по робототехнике, Социально-коммуникативные навыки
- Языки программирования: Python и micro Python
- Тип управления: Текстовое программирование
- Номер по приказу: 2.22.24.
- Название товара в проектах: 2.22.24.Комплект технического зрения
- Страна производства: Россия
- Номер по приказу: 2.22.5., 2.22.31., 2.22.34.
- Название товара в проектах: 2.22.5. Ресурсный набор для творческого проектирования и соревновательной деятельности, 2.22.31.Ресурсный набор к контроллеру, 2.22.34. Ресурсный набор к универсальному комплекту для организации командных и индивидуальных инженерных соревнований
- Страна производства: Россия
- Номер по приказу: 2.22.20.
- Название товара в проектах: 2.22.20. Расширенный робототехнический набор для изучения основ манипуляторной робототехники
- Страна производства: Россия
Общие сведения
- Образовательный набор роботизированного манипулятора предназначен для изучения современных технологий, включая основы Web-технологий, системного администрирования, программирования и концепции «Интернета вещей». Набор позволяет освоить работу с операционной системой ROS (Robot Operating System), принципы машинного зрения и автоматизации складских процессов.
Технические особенности:
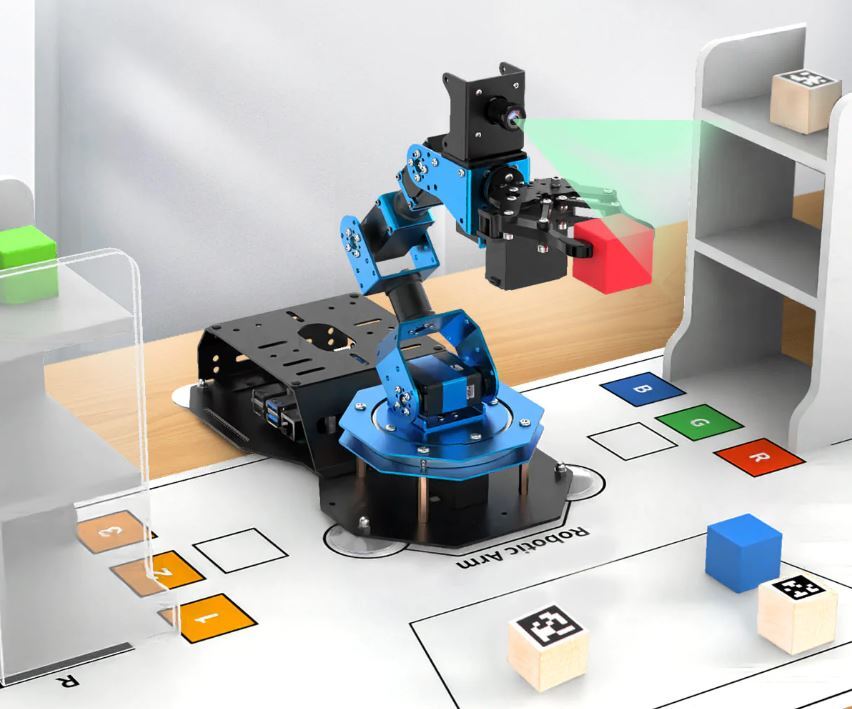
- 6DOF Робот-манипулятор с камерой видом от первого лица.
- Оснащен широкоугольной HD-камерой (180° обзор) для распознавания цветов, сортировки объектов и их укладки.
- Работает на базе контроллера Raspberry Pi 4B или CM4 , что обеспечивает поддержку проектов по управлению движением и машинному зрению.
- Использует умные адресные сервоприводы с функцией обратной связи для точного управления.
- Поддержка программирования на Python с открытым исходным кодом и подробными аннотациями.
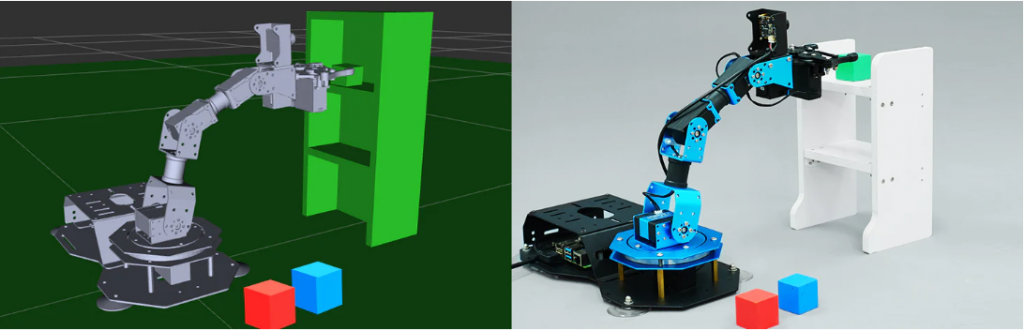
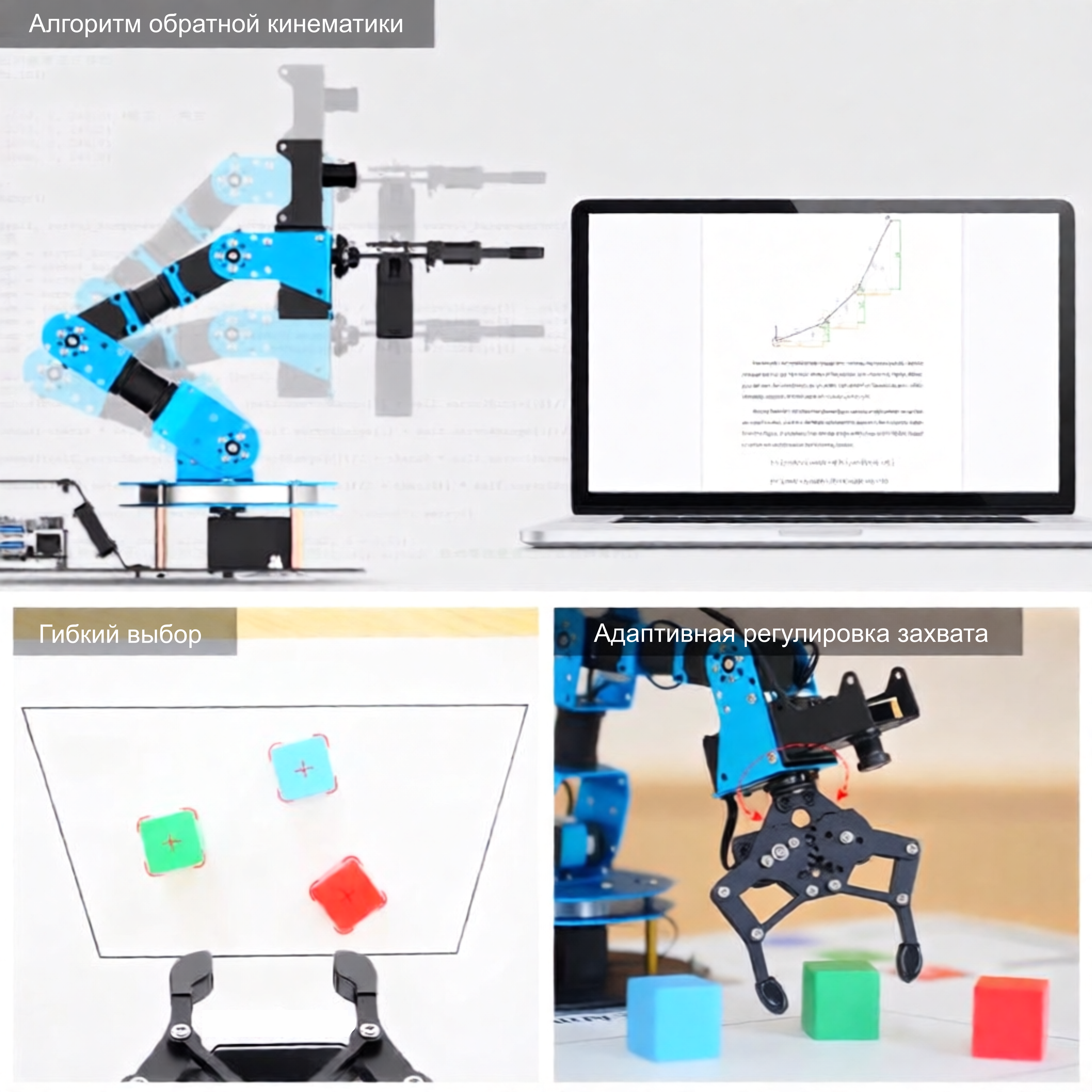
- Интеграция обратной кинематики для точного захвата объектов.
- Совместимость с ROS MoveIt для планирования движения.
- Возможность расширения датчиков (ультразвуковые, световые, сенсорные модули).
Возможности набора
- Изучить принципы работы моторов, датчиков и систем обратной связи.
- Научиться программировать манипулятор в среде Python и работать с машинным зрением через OpenCV.
- Познакомиться с операционной системой ROS и её возможностями для управления роботами.
- Применять технологии «Интернета вещей» для автоматизации процессов.
- Создавать творческие проекты с использованием дополнительных датчиков и модулей.
- Формировать навыки командной работы, логического мышления и проектного мышления
Уровни обучения
Вводный уровень
- Знакомство с основами робототехники и мехатроники.
- Изучение устройства манипулятора: компоненты и функционал.
- Первые шаги в программировании: работа с Python для управления движением и захватом объектов.
Базовый уровень
- Изучение принципов работы датчиков и систем обратной связи.
- Программирование задач для манипулятора: сортировка объектов и перемещение по координатам.
- Применение машинного зрения через OpenCV для обработки изображений.
Исследовательский уровень
- Глубокое изучение обратной кинематики и алгоритмов управления движением.
- Работа с ROS MoveIt для планирования сложных траекторий.
- Разработка проектов по автоматизации складских операций.
Проектный уровень
- Создание комплексных проектов с использованием всех возможностей набора.
- Интеграция дополнительных датчиков для реализации творческих идей.
- Командная работа над проектами автоматизации производственных процессов.
Похожие товары

69 000
руб.
руб.

192 500
руб.
руб.

37 100
руб.
руб.

176 000
руб.
руб.

162 000
руб.
руб.

209 000
руб.
руб.